NI002, my second robot

I was 19 years old,when i made it, in 2000, so long time ago.I studied in the secondary school that time. That was my first
real big project.
I built a first robot too, in 1998, but it didn’t work. So i dropped it out to the trash.
You can see the description of my second robot. It is
entirely automatic, operated by buttery power. (without
microcomputer) The following is a description of how it works:
It continually moves forward until it reaches obstacle, that
the opticle sensors sens.Theobstacle can be something standing
in front, or it on the edge of the table. After it stops, it
moves backwards, turns, and about 1 seconds later continues
forward. The sensation happens on repelled signal, which is
sensed by phototransistors. The signal is given on a 25KHz
frequency.
The entire interior i planned and prepared about 2 months.
Cost:30$
Parts used:
- 31 transistors
- 10 diodes
- 55 resistors
- 18 capacitors
- 1 infra LED (200mW/25mW)
- 2 DC walkman-motor
- 5 AAA-battery
Here are the „plans”:
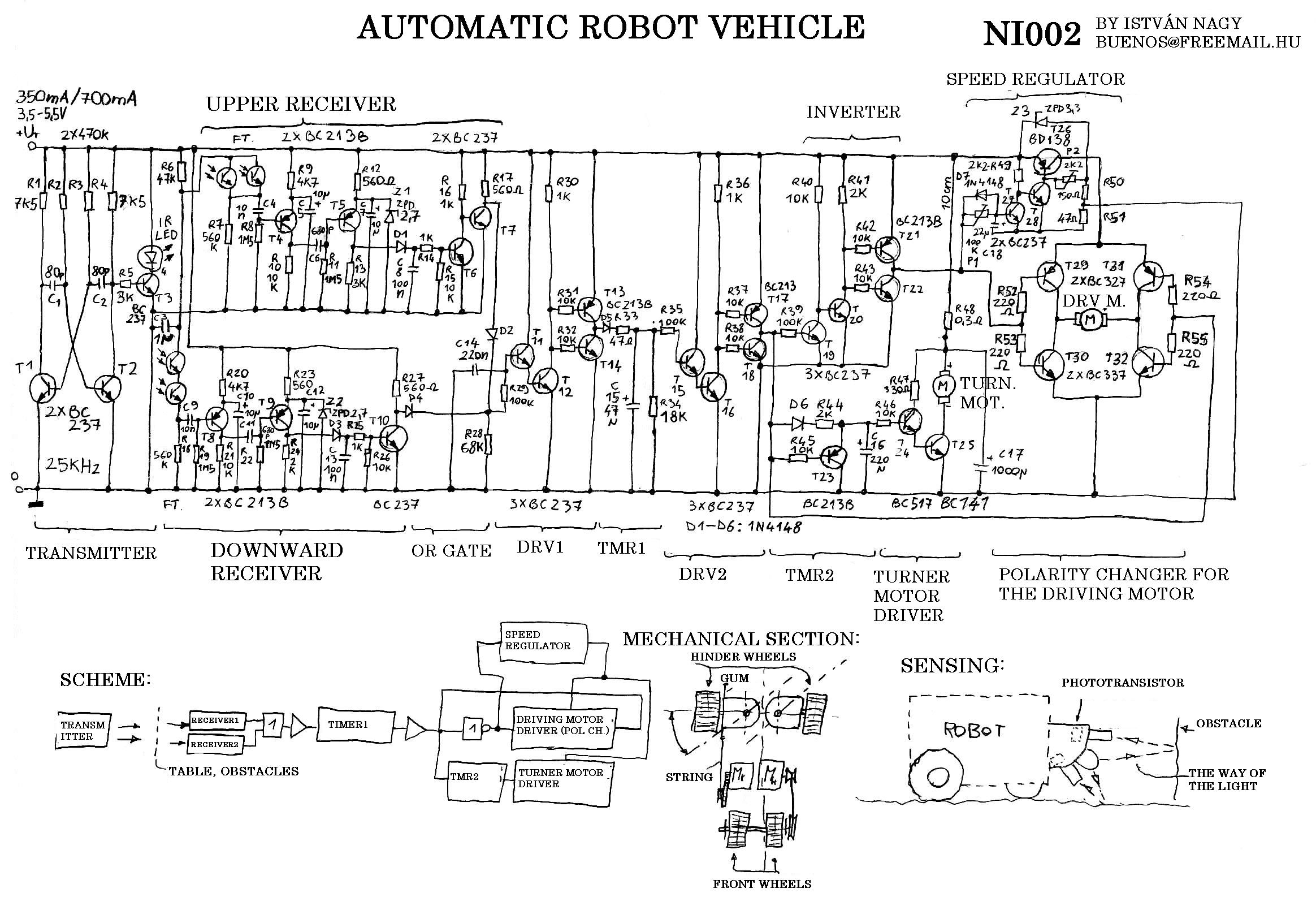
(click on the image to enlarge)
And a little video: